The art of measuring distance and angle for locating point on the surface of the earth.
Plane Surveying : When are to be survey is small so that effect of earth curvature may be neglected is called plane surveying
Geodetic Surveying : When the area is large so that effect of curvature of earth must be considered is called geodetic surveying
Principles of surveying
- Always work from Whole To Part
- Choose the method of survey that is most suitable for the purpose
- always make provision of adequate check
- Record field data carefully
Reconnaissance survey
It is the preliminary survey. It is used at commencement of any survey work through suggesting possible alternative paths and routes. The reconnaissance survey is an extensive study of an entire area that might be used for a survey work, showing principal feature road etc.
Scale
- Numeric Scale : shown as ratio or representative friction (RF)
- Graphical Scale : Shown as Line subdivided in plan distance corresponding to units of length on ground
Errors in Survey
Errors of measurement in survey are of three kinds:
- Mistakes or Gross Error (GE)
- Systematic or Cumulative Error (SE)
- Accidental Error (AE)
Mistakes : Mistakes are errors that arise from inattention, inexperience,
carelessness and poor judgment or confusion in the mind of the observer. If a mistake is undetected, it produces a serious effect on the final result.
Systematic Error: A systematic error is an error that under the same
conditions will always be of the same size and sign. A systematic error always follows some definite mathematical or physical law, and a correction can be determined and applied.
Accidental Error : Accidental errors are those which remain after mistakes
and systematic errors have been eliminated and are caused by a combination of reasons beyond the ability of the observer to control.
Probability Curve
Probability curve describes the distribution of probability over the values of a random variable.

Principle of Least Square
In observations of equal precision , the most probable values of the observed quantities are those that render the sum of the squares of the residual errors a minimum
Most Probable error for a single measurement:
Es = ± 0.6745 * Sq. root {∑ V² / n-1}
Where, Es – Probable error of single observation
V – Difference between any single observation and mean
n – no. of observations.
Probable error of an average:
Em = Es/ Sq.root (n)
Where, Em – probable error of the mean. & Es – Probable error of single observation
Instruments used in Surveying
Chain
Chains are formed of straight links of steel wire joined to each other by three small circular or oval wire rings.

Tape :
Measuring tapes are made of steel, coated linen, or synthetic material. They are available in lengths of 20, 30 and 50 m. Centimetres, Inch and metres are usually indicated on the tape.
Invar tape is made of alloy of NI , FE and Carbon and have very low coefficient of expansion
Arrow or Marking Pin
Arrows or making pins are made of tempered steel wire 4mm in diameter and generally 10 arrows are supplied with a chain. An arrow is inserted into the ground after the chain length is measured on the ground. Usually the length of an arrow is 40cm and one end of it is made sharp and the other end is bent into a circle for facility of carrying.

Pegs

Wooden pegs are used to mark the positions of the stations terminal points of a survey line. They are made of hard timber, generally 2.5cm or 3 cm square and 15cm long, tapered at the end.
Ranging Rods
Made of Well seasoned Straight Grained Timber of circular or octagonal crosssection
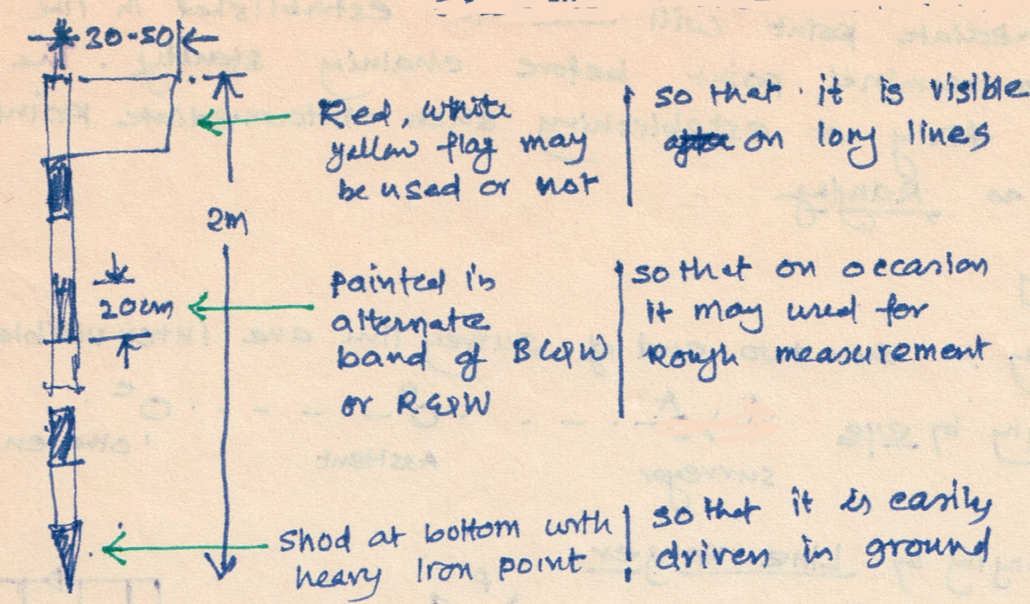
Ranging Rods
The ranging rods are used for making the positions of stations and for ranging the lines. They are made of ell seasoned straight grained timber teak. They circular in cross section of 3cm diameter and have a length of either 2 or 3cm, lengh being more common.
RANGING RODS are shod at the bottom with a heavy iron points. In order to make them visible at a distance, they are pained alternatively black and white or red and white.
Offset rod
Offset rod is similar to that of ranging rod. They are should with pointed iron shoe at one end, ad provided with a notch or a hook at the other for pulling or pushing the chain through a hedges or other obstructions.
Plumb Bob
While chaining along sloping ground, a plump is required to transfer the points to the ground. It is also used for accurate centering of the theodolite compass, plane table etc over a station mark and for testing the vertically of ranging poles
Total Station
A total station is a modern theodolite which is a transit fitted with an electronic distance meter (EDM). A microprocessor unit in the total station processes the data collected to determine:

- The average of multiple angles measured.
- The average of multiple distance measured.
- The horizontal distance.
- The distance between any two points.
- The elevation of objects.
- All three coordinates of the observed points.
The data that is collected and processed can be downloaded for further processing by computer aided design (CAD), building information modelling (BIM) or geographic information system (GIS) software.
DGPS survey
The DGPS (Differential Geographic Positioning System) Survey
These are surveys which are carried out using the differential GPS. It achieves higher positional accuracy by making use of the differential capabilities of two GPS antenna linked by a radio signal. Each DGPS uses a network of fixed ground-based reference stations to broadcast the difference between the positions indicated by the GPS satellite system and known fixed positions. These stations broadcast the difference between the measured satellite pseudo-ranges and actual (internally computed) pseudo-ranges, and receiver stations may correct their pseudo-ranges by the same amount. The digital correction signal is typically broadcast locally over ground-based transmitters of shorter range.
The DGPS Survey main features are:
- Position is determined by distance from at least 4 satellites
- Time taken by signal to travel from satellite to antenna used to determine the distance.
- The base station calculates the difference between the specified coordinates of its location and those indicated by the satellites.
- The base is continuously broadcasting a signal to the rover of this difference.
- The rover then uses this same difference to accurately determine it’s location.
DGPS Advantages
Higher accuracy (+/-0.045m) , Real time data , Worldwide coverage
3D survey results , 24 hours availability , Not affected by cloud cover
Mobile LiDAR Survey
Mobile LiDAR ( light detection and ranging) is an innovative mapping solution that incorporates the most advanced LiDAR sensors, cameras and position/navigation to collect survey-quality point data quickly and accurately .
Mobile Lidar (also mobile laser scanning) is when two or more scanners are attached to a moving vehicle to collect data along a path. These scanners are almost always paired with other kinds of equipment, including GNSS receivers and IMUs
UAV /Drone Survey
Unmanned aerial vehicle (UAV) carrying navigation equipment (advanced autopilot module APM, GPS, inertial measurement unit – IMU),
camera .To create 3D maps from aerial photogrammetry, the camera is mounted on the drone and is usually pointed vertically towards the ground.
Using photogrammetry to create 3D models of monuments or statues, the camera is mounted horizontally on the UAV. Multiple overlapping photos (80 to 90% overlap) of the ground or model are taken as the UAV flies along an autonomous programmed flight path called a waypoint. To overlap photos of an object or land by 80 to 90% would be impossible to complete accurately by pilot navigation. It is essential to have a UAV which has waypoint navigation technology.
Ranging
If survey line length exceed the chain length, it is necessary to align intermediate points on chain line so that the measurements are along the line. The process of locating intermediate points on survey line is known as ranging.
There are two methods of ranging :
- Direct ranging
- Indirect / Reciprocal ranging.
Direct ranging
Ranging by eye

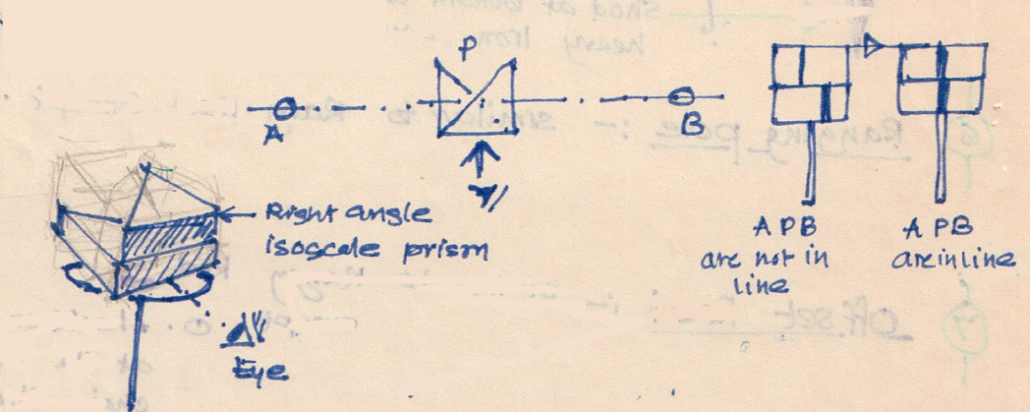
Ranging by Line Ranger
Indirect / Reciprocal ranging
When both the end of survey line are not inter-visible

Due to intervening ground, if the ranging rod at B is not visible from station A, reciprocal ranging may be resorted. above Figure shows this scheme of ranging. It needs two assistants one at point M and another at point N, where from those points both station A and station B are visible. It needs one surveyor at A and another at B. To start with M and N are approximately selected, say M1 and N1. Then surveyor near end A ranges person near M to position M2 such that AM2N1 are in a line. Then surveyor at B directs person at N, to move to N2 such that BN2M2 are in a line. The process is repeated till AMNB are in a line.
Register & Download PDF for Educational Purposes Only

surveying study notes part-1.pdf
surveying study notes part-2.pdf
Register as member and login to download attachment [pdf] by right-click the pdf link and Select “Save link as” use for Educational Purposes Only
Disclaimer
Information on this site is purely for education purpose. The materials used and displayed on the Sites, including text, photographs, graphics, illustrations and artwork, video, music and sound, and names, logos, IS Codes, are copyrighted items of respective owners. Front Desk is not responsible and liable for information shared above.